
30.21. Graphs¶
30.21.1. Graphs¶
30.21.1.1. Graphs¶
- A graph \(G = (V, E)\) consists of a set of vertices \(V\), and a set of edges \(E\), such that each edge in \(E\) is a connection between a pair of vertices in \(V\).
- The number of vertices is written \(|V|\), and the number edges is written \(|E|\).
30.21.1.2. Paths, Cycles¶
30.21.1.3. Connected Components¶
- The maximum connected subgraphs of an undirected graph are called connected components.
30.21.1.4. Directed Graph Representation¶
30.21.1.5. Undirected Graph Representation¶
30.21.1.6. Representation Space Costs¶
- Adjacency Matrix Space:
- \(|V|^2\)
- Small constants
- Adjacency List Space:
- \(|V| + |E|\)
- Larger constants
30.21.1.7. Graph ADT¶
interface Graph { // Graph class ADT // Initialize the graph with some number of vertices void init(int n); // Return the number of vertices int nodeCount(); // Return the current number of edges int edgeCount(); // Get the value of node with index v Object getValue(int v); // Set the value of node with index v void setValue(int v, Object val); // Adds a new edge from node v to node w with weight wgt void addEdge(int v, int w, int wgt); // Get the weight value for an edge int weight(int v, int w); // Removes the edge from the graph. void removeEdge(int v, int w); // Returns true iff the graph has the edge boolean hasEdge(int v, int w); // Returns an array containing the indicies of the neighbors of v int[] neighbors(int v); }
30.21.1.8. .¶
.
30.21.1.9. Visiting Neighbors¶
int[] nList = G.neighbors(v); for (int i=0; i< nList.length; i++) if (G.getValue(nList[i]) != VISITED) DoSomething();
30.21.1.10. Graph Traversals¶
- Some applications require visiting every vertex in the graph exactly once.
- The application may require that vertices be visited in some special order based on graph topology.
- Examples:
- Artificial Intelligence Search
- Shortest paths problems
30.21.1.11. Graph Traversals (2)¶
- To insure visiting all vertices:
void graphTraverse(Graph G) { int v; for (v=0; v<G.nodeCount(); v++) G.setValue(v, null); // Initialize for (v=0; v<G.nodeCount(); v++) if (G.getValue(v) != VISITED) doTraversal(G, v); }
30.21.1.12. Depth First Search (1)¶
void DFS(Graph G, int v) { PreVisit(G, v); G.setValue(v, VISITED); int[] nList = G.neighbors(v); for (int i=0; i< nList.length; i++) if (G.getValue(nList[i]) != VISITED) DFS(G, nList[i]); PostVisit(G, v); }


30.21.1.14. Depth First Search (3)¶
Cost: \(\Theta(|V| + |E|)\).
30.21.1.15. Breadth First Search (1)¶
- Like DFS, but replace stack with a queue.
- Visit vertex’s neighbors before continuing deeper in the tree.
void BFS(Graph G, int v) { LQueue Q = new LQueue(G.nodeCount()); Q.enqueue(v); G.setValue(v, VISITED); while (Q.length() > 0) { // Process each vertex on Q v = (Integer)Q.dequeue(); PreVisit(G, v); int[] nList = G.neighbors(v); for (int i=0; i< nList.length; i++) if (G.getValue(nList[i]) != VISITED) { // Put neighbors on Q G.setValue(nList[i], VISITED); Q.enqueue(nList[i]); } PostVisit(G, v); } }
30.21.1.17. Topological Sort¶
- Problem: Given a set of jobs, courses, etc., with prerequisite constraints, output the jobs in an order that does not violate any of the prerequisites.
30.21.1.18. Depth-First Topological Sort (1)¶
void topsortDFS(Graph G) { int v; for (v=0; v<G.nodeCount(); v++) G.setValue(v, null); // Initialize for (v=0; v<G.nodeCount(); v++) if (G.getValue(v) != VISITED) tophelp(G, v); } void tophelp(Graph G, int v) { G.setValue(v, VISITED); int[] nList = G.neighbors(v); for (int i=0; i< nList.length; i++) if (G.getValue(nList[i]) != VISITED) tophelp(G, nList[i]); printout(v); }
30.21.1.19. Depth-First Topological Sort (1)¶
30.21.1.20. .¶
.
30.21.1.21. Queue-Based Topsort (1)¶
void topsortBFS(Graph G) { // Topological sort: Queue Queue Q = new LQueue(G.nodeCount()); int[] Count = new int[G.nodeCount()]; int[] nList; int v; for (v=0; v<G.nodeCount(); v++) Count[v] = 0; // Initialize for (v=0; v<G.nodeCount(); v++) { // Process every edge nList = G.neighbors(v); for (int i=0; i< nList.length; i++) Count[nList[i]]++; // Add to v's prereq count } for (v=0; v<G.nodeCount(); v++) // Initialize Queue if (Count[v] == 0) // V has no prerequisites Q.enqueue(v); while (Q.length() > 0) { // Process the vertices v = (Integer)Q.dequeue(); printout(v); // PreVisit for Vertex V nList = G.neighbors(v); for (int i=0; i< nList.length; i++) { Count[nList[i]]--; // One less prerequisite if (Count[nList[i]] == 0) // This vertex is now free Q.enqueue(nList[i]); } } }
30.21.1.22. .¶
.
30.21.1.23. Queue-Based Topsort (2)¶
30.21.1.24. .¶
.
30.21.1.25. Shortest Paths Problems¶
- Input: A graph with weights or costs associated with each edge.
- Output: The list of edges forming the shortest path.
- Sample problems:
- Find shortest path between two named vertices
- Find shortest path from S to all other vertices
- Find shortest path between all pairs of vertices
- Will actually calculate only distances.
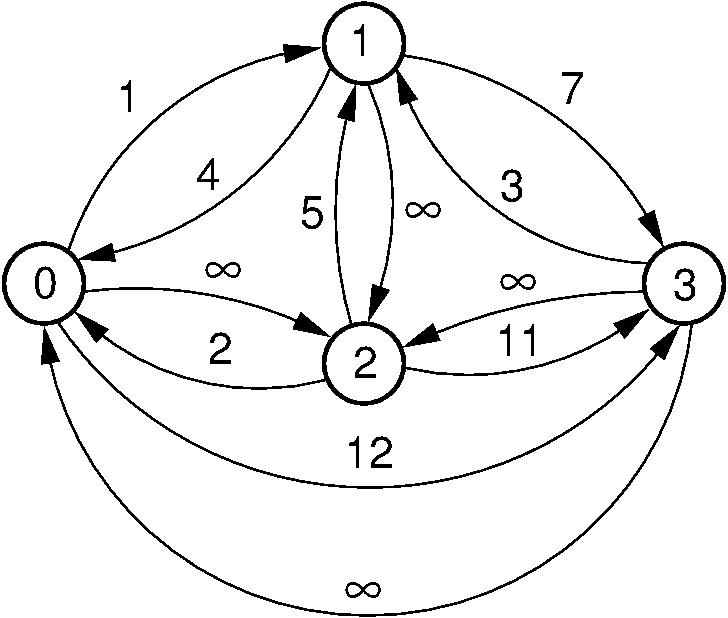
30.21.1.26. Shortest Paths Definitions¶
- \(d(A, B)\) is the shortest distance from vertex \(A\) to \(B\).
- \(w(A, B)\) is the weight of the edge connecting \(A\) to \(B\).
- If there is no such edge, then \(w(A, B) = \infty\).
30.21.1.27. Single-Source Shortest Paths¶
- Given start vertex \(s\), find the shortest path from \(s\) to all other vertices.
- Try 1: Visit vertices in some order, compute shortest paths for all vertices seen so far, then add shortest path to next vertex \(x\).
- Problem: Shortest path to a vertex already processed might go through \(x\).
- Solution: Process vertices in order of distance from \(s\).
30.21.1.28. Dijkstra’s Algorithm Example¶
30.21.1.29. .¶
.
30.21.1.30. Dijkstra’s Implementation¶
// Compute shortest path distances from s, store them in D void Dijkstra(Graph G, int s, int[] D) { for (int i=0; i<G.nodeCount(); i++) // Initialize D[i] = INFINITY; D[s] = 0; for (int i=0; i<G.nodeCount(); i++) { // Process the vertices int v = minVertex(G, D); // Find next-closest vertex G.setValue(v, VISITED); if (D[v] == INFINITY) return; // Unreachable int[] nList = G.neighbors(v); for (int j=0; j<nList.length; j++) { int w = nList[j]; if (D[w] > (D[v] + G.weight(v, w))) D[w] = D[v] + G.weight(v, w); } } }
30.21.1.31. Implementing minVertex¶
- Issue: How to determine the next-closest vertex? (I.e., implement
minVertex)
- Approach 1: Scan through the table of current distances.
- Cost: \(\Theta(|V|^2 + |E|) = \Theta(|V|^2)\).
- Approach 2: Store unprocessed vertices using a min-heap to implement a priority queue ordered by \(D\) value. Must update priority queue for each edge.
- Cost: \(\Theta((|V| + |E|)log|V|)\)
30.21.1.32. Approach 1¶
// Find the unvisited vertex with the smalled distance int minVertex(Graph G, int[] D) { int v = 0; // Initialize v to any unvisited vertex; for (int i=0; i<G.nodeCount(); i++) if (G.getValue(i) != VISITED) { v = i; break; } for (int i=0; i<G.nodeCount(); i++) // Now find smallest value if ((G.getValue(i) != VISITED) && (D[i] < D[v])) v = i; return v; }
30.21.1.33. Approach 2¶
// Dijkstra's shortest-paths: priority queue version void DijkstraPQ(Graph G, int s, int[] D) { int v; // The current vertex KVPair[] E = new KVPair[G.edgeCount()]; // Heap for edges E[0] = new KVPair(0, s); // Initial vertex MinHeap H = new MinHeap(E, 1, G.edgeCount()); for (int i=0; i<G.nodeCount(); i++) // Initialize distance D[i] = INFINITY; D[s] = 0; for (int i=0; i<G.nodeCount(); i++) { // For each vertex do { KVPair temp = H.removemin(); if (temp == null) return; // Unreachable nodes exist v = (Integer)temp.value(); } // Get position while (G.getValue(v) == VISITED); G.setValue(v, VISITED); if (D[v] == INFINITY) return; // Unreachable int[] nList = G.neighbors(v); for (int j=0; j<nList.length; j++) { int w = nList[j]; if (D[w] > (D[v] + G.weight(v, w))) { // Update D D[w] = D[v] + G.weight(v, w); H.insert(D[w], w); } } } }
30.21.1.34. .¶
.
30.21.1.35. All-pairs Shortest Paths (1)¶
- We could run Shortest Paths starting at each vertex.
- Better is to use Floyd's algorithm.
- An example of Dynamic Programming
- Simpler than it sounds: A trivial triple loop
- Define a k-path from vertex \(v\) to vertex \(u\) to be any path whose intermediate vertices (aside from \(v\) and \(u\)) all have indices less than \(k\).
30.21.1.36. All-pairs Shortest Paths (2)¶
30.21.1.37. Floyd's Algorithm¶
/** Compute all-pairs shortest paths */ static void Floyd(Graph G, int[][] D) { for (int i=0; i<G.n(); i++) // Initialize D with weights for (int j=0; j<G.n(); j++) if (G.weight(i, j) != 0) D[i][j] = G.weight(i, j); for (int k=0; k<G.n(); k++) // Compute all k paths for (int i=0; i<G.n(); i++) for (int j=0; j<G.n(); j++) if ((D[i][k] != Integer.MAX_VALUE) && (D[k][j] != Integer.MAX_VALUE) && (D[i][j] > (D[i][k] + D[k][j]))) D[i][j] = D[i][k] + D[k][j]; }
30.21.1.38. Minimal Cost Spanning Trees¶
Minimal Cost Spanning Tree (MST) Problem:
- Input: An undirected, connected graph G.
- Output: The subgraph of G that
- has minimum total cost as measured by summing the values of all the edges in the subset, and
- keeps the vertices connected.
30.21.1.39. MST Example¶
30.21.1.40. Prim’s MST Algorithm¶
30.21.1.41. .¶
.
30.21.1.42. Implementation 1¶
// Compute shortest distances to the MCST, store them in D. // V[i] will hold the index for the vertex that is i's parent in the MCST void Prim(Graph G, int s, int[] D, int[] V) { for (int i=0; i<G.nodeCount(); i++) // Initialize D[i] = INFINITY; D[s] = 0; for (int i=0; i<G.nodeCount(); i++) { // Process the vertices int v = minVertex(G, D); // Find next-closest vertex G.setValue(v, VISITED); if (D[v] == INFINITY) return; // Unreachable if (v != s) AddEdgetoMST(V[v], v); int[] nList = G.neighbors(v); for (int j=0; j<nList.length; j++) { int w = nList[j]; if (D[w] > G.weight(v, w)) { D[w] = G.weight(v, w); V[w] = v; } } } }
30.21.1.43. Alternate Implementation¶
- As with Dijkstra’s algorithm, the key issue is determining which vertex is next closest.
- As with Dijkstra’s algorithm, the alternative is to use a priority queue.
- Running times for the two implementations are identical to the corresponding Dijkstra’s algorithm implementations.
30.21.1.44. Kruskal’s MST Algorithm (1)¶
- Initially, each vertex is in its own MST.
- Merge two MST’s that have the shortest edge between them.
- Use a priority queue to order the unprocessed edges. Grab next one at each step.
- How to tell if an edge connects two vertices already in the same MST?
- Use the UNION/FIND algorithm with parent-pointer
- representation.
30.21.1.45. Kruskal’s MST Algorithm (2)¶
30.21.1.46. .¶
.
30.21.1.47. Kruskal’s MST Algorithm (3)¶
- Cost is dominated by the time to remove edges from the heap.
- Can stop processing edges once all vertices are in the same MST
- Total cost: \(\Theta(|V| + |E| log |E|)\).
