30.19.1.3. Primary vs. Secondary Storage¶
- Primary storage: Main memory (RAM)
- Secondary Storage: Peripheral devices
- Disk drives
- Tape drives
- Flash drives
- Logical view of files:
- An a array of bytes.
- A file pointer marks the current position.
- Three fundamental operations:
- Read bytes from current position (move file pointer)
- Write bytes to current position (move file pointer)
- Set file pointer to specified byte position.
RandomAccessFile(String name, String mode)
close()
read(byte[] b)
write(byte[] b)
seek(long pos)
- Primary storage: Main memory (RAM)
- Secondary Storage: Peripheral devices
- Disk drives
- Tape drives
- Flash drives
\[\begin{split}\begin{array}{l|r|r|r|r|r|r|r} \hline \textbf{Medium}& 1996 & 1997 & 2000 & 2004 & 2006 & 2008 & 2011\\ \hline \textbf{RAM}& \$45.00 & 7.00 & 1.500 & 0.3500 & 0.1500 & 0.0339 & 0.0138\\ \textbf{Disk}& 0.25 & 0.10 & 0.010 & 0.0010 & 0.0005 & 0.0001 & 0.0001\\ \textbf{USB drive}& -- & -- & -- & 0.1000 & 0.0900 & 0.0029 & 0.0018\\ \textbf{Floppy}& 0.50 & 0.36 & 0.250 & 0.2500 & -- & -- & --\\ \textbf{Tape}& 0.03 & 0.01 & 0.001 & 0.0003 & -- & -- & --\\ \textbf{Solid State}& -- & -- & -- & -- & -- & -- & 0.0021\\ \hline \end{array}\end{split}\]
- (Costs per Megabyte)
- RAM is usually volatile.
- RAM is about 1/2 million times faster than disk.
- Minimize the number of disk accesses!
- Arrange information so that you get what you want with few disk accesses.
- Arrange information to minimize future disk accesses.
- An organization for data on disk is often called a file structure.
- Disk-based space/time tradeoff: Compress information to save processing time by reducing disk accesses.
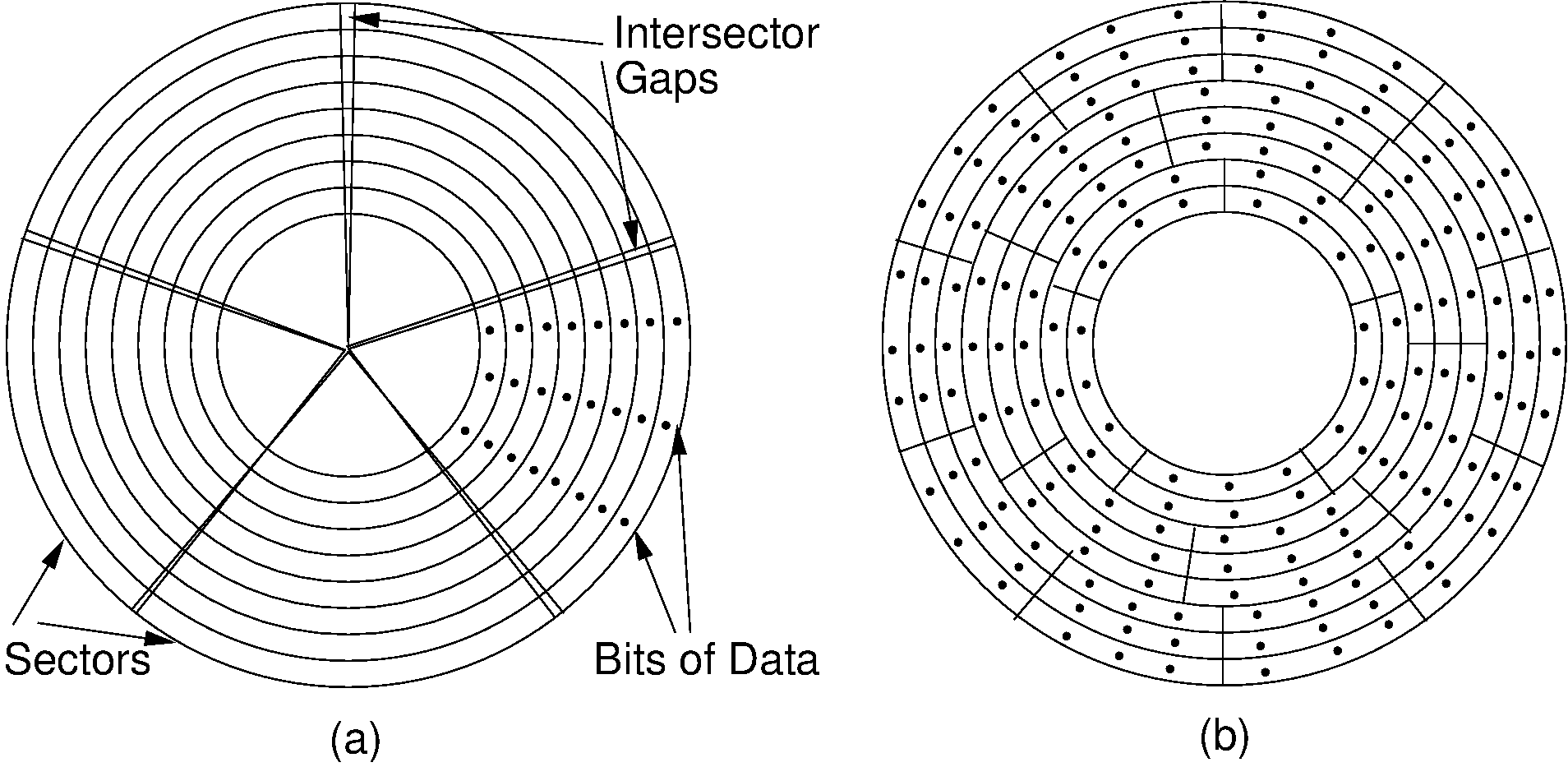
- A sector is the basic unit of I/O.
- Locality of Reference: When record is read from disk, next request is likely to come from near the same place on the disk.
- Cluster: Smallest unit of file allocation, usually several sectors.
- Extent: A group of physically contiguous clusters.
- Internal fragmentation: Wasted space within sector if record size does not match sector size; wasted space within cluster if file size is not a multiple of cluster size.
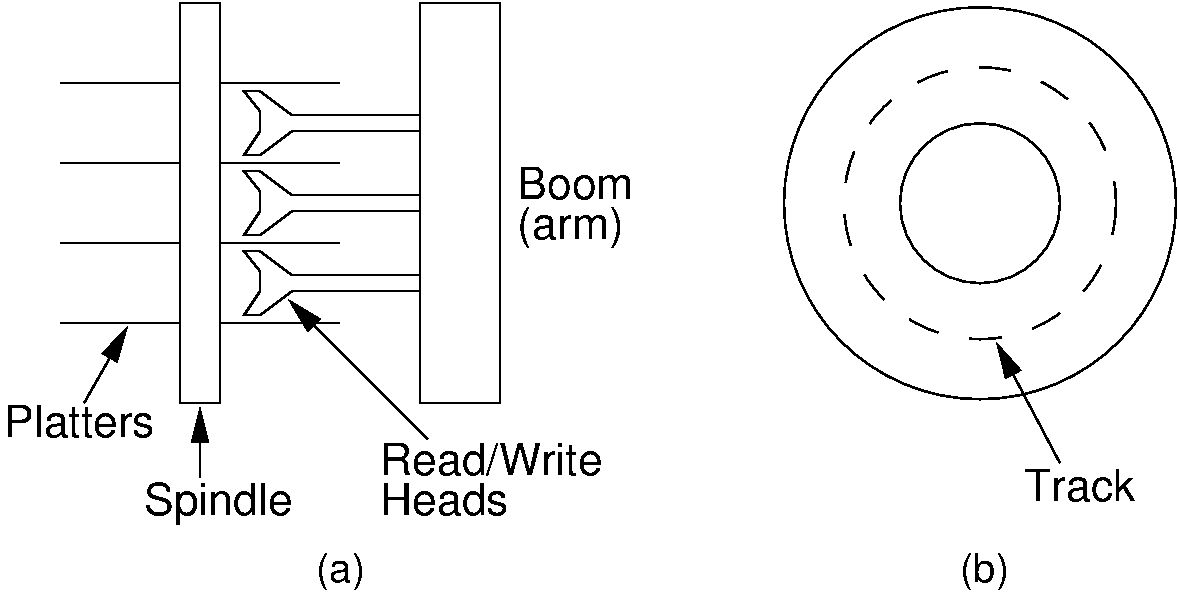
- Seek time: Time for I/O head to reach desired track. Largely determined by distance between I/O head and desired track.
- Track-to-track time: Minimum time to move from one track to an adjacent track.
- Average Access time: Average time to reach a track for random access.
- Rotational Delay or Latency: Time for data to rotate under I/O head.
- One half of a rotation on average.
- At 7200 rpm, this is 8.3/2 = 4.2ms.
- Transfer time: Time for data to move under the I/O head.
- At 7200 rpm: Number of sectors read/Number of sectors per track * 8.3ms.
- 16.8 GB disk on 10 platters = 1.68GB/platter
- 13,085 tracks/platter
- 256 sectors/track
- 512 bytes/sector
- Track-to-track seek time: 2.2 ms
- Average seek time: 9.5ms
- 4KB clusters, 32 clusters/track.
- 5400RPM
- Read a 1MB file divided into 2048 records of 512 bytes (1 sector) each.
- Assume all records are on 8 contiguous tracks.
- First track: 9.5 + (11.1)(1.5) = 26.2 ms
- Remaining 7 tracks: 2.2 + (11.1)(1.5) = 18.9ms.
- Total: 26.2 + 7 * 18.9 = 158.5ms
- Read a 1MB file divided into 2048 records of 512 bytes (1 sector) each.
- Assume all file clusters are randomly spread across the disk.
- 256 clusters. Cluster read time is 8/256 of a rotation for about 5.9ms for both latency and read time.
- 256(9.5 + 5.9) is about 3942ms or nearly 4 sec.
- Read time for one track: \(9.5 + (11.1)(1.5) = 26.2\) ms
- Read time for one sector: \(9.5 + 11.1/2 + (1/256)11.1 = 15.1\) ms
- Read time for one byte: \(9.5 + 11.1/2 = 15.05\) ms
- Nearly all disk drives read/write one sector (or more) at every I/O access
- Also referred to as a page or block
- Samsung Spinpoint T166
- 500GB (nominal)
- 7200 RPM
- Track to track: 0.8 ms
- Average track access: 8.9 ms
- Bytes/sector: 512
- 6 surfaces/heads
- The information in a sector is stored in a buffer or cache.
- If the next I/O access is to the same buffer, then no need to go to disk.
- Disk drives usually have one or more input buffers and one or more output buffers.
- A series of buffers used by an application to cache disk data is called a buffer pool.
- Virtual memory uses a buffer pool to imitate greater RAM memory by actually storing information on disk and “swapping” between disk and RAM.
- Which buffer should be replaced when new data must be read?
- First-in, First-out: Use the first one on the queue.
- Least Frequently Used (LFU): Count buffer accesses, reuse the least used.
- Least Recently used (LRU): Keep buffers on a linked list. When buffer is accessed, bring it to front. Reuse the one at end.
// ADT for buffer pools using the message-passing style public interface BufferPoolADT { // Copy "sz" bytes from "space" to position "pos" in the buffered storage public void insert(byte[] space, int sz, int pos); // Copy "sz" bytes from position "pos" of the buffered storage to "space" public void getbytes(byte[] space, int sz, int pos); }
// ADT for buffer pools using the buffer-passing style public interface BufferPoolADT { // Return pointer to the requested block public byte[] getblock(int block); // Set the dirty bit for the buffer holding "block" public void dirtyblock(int block); // Tell the size of a buffer public int blocksize(); };
- Disadvantage of message passing:
- Messages are copied and passed back and forth.
- Disadvantages of buffer passing:
- The user is given access to system memory (the buffer itself)
- The user must explicitly tell the buffer pool when buffer contents have been modified, so that modified data can be rewritten to disk when the buffer is flushed.
- The pointer might become stale when the bufferpool replaces the contents of a buffer.
- Be able to avoid reading data when the block contents will be replaced.
- Be able to support multiple users accessing a buffer, and independantly releasing a buffer.
- Don’t make an active buffer stale.
// Improved ADT for buffer pools using the buffer-passing style. // Most user functionality is in the buffer class, not the buffer pool itself. // A single buffer in the buffer pool public interface BufferADT { // Read the associated block from disk (if necessary) and return a // pointer to the data public byte[] readBlock(); // Return a pointer to the buffer's data array (without reading from disk) public byte[] getDataPointer(); // Flag buffer's contents as having changed, so that flushing the // block will write it back to disk public void markDirty(); // Release the block's access to this buffer. Further accesses to // this buffer are illegal public void releaseBuffer(); }
public interface BufferPoolADT { // Relate a block to a buffer, returning a pointer to a buffer object Buffer acquireBuffer(int block); }
- Problem: Sorting data sets too large to fit into main memory.
- Assume data are stored on disk drive.
- To sort, portions of the data must be brought into main memory, processed, and returned to disk.
- An external sort should minimize disk accesses.
- Secondary memory is divided into equal-sized blocks (512, 1024, etc…)
- A basic I/O operation transfers the contents of one disk block to/from main memory.
- Under certain circumstances, reading blocks of a file in sequential order is more efficient. (When?)
- Primary goal is to minimize I/O operations.
- Assume only one disk drive is available.
- Often, records are large, keys are small.
- Ex: Payroll entries keyed on ID number
- Approach 1: Read in entire records, sort them, then write them out again.
- Approach 2: Read only the key values, store with each key the location on disk of its associated record.
- After keys are sorted the records can be read and rewritten in sorted order.
- Quicksort requires random access to the entire set of records.
- Better: Modified Mergesort algorithm.
- Process \(n\) elements in \(\Theta(\log n)\) passes.
- A group of sorted records is called a run.
1. Split the file into two files.2. Read in a block from each file.3. Take first record from each block, output them in sorted order.4. Take next record from each block, output them to a second file in sorted order.5. Repeat until finished, alternating between output files. Read new input blocks as needed.6. Repeat steps 2-5, except this time input files have runs of two sorted records that are merged together.7. Each pass through the files provides larger runs.
- Is each pass through input and output files sequential?
- What happens if all work is done on a single disk drive?
- How can we reduce the number of Mergesort passes?
- In general, external sorting consists of two phases:
- Break the files into initial runs
- Merge the runs together into a single run.
- General approach:
- Read as much of the file into memory as possible.
- Perform an in-memory sort.
- Output this group of records as a single run.
- Break available memory into an array for the heap, an input buffer, and an output buffer.
- Fill the array from disk.
- Make a min-heap.
- Send the smallest value (root) to the output buffer.
If the next key in the file is greater than the last value output, then
- Replace the root with this key
else
- Replace the root with the last key in the array
Add the next record in the file to a new heap (actually, stick it at the end of the array).
- Imagine a snowplow moving around a circular track on which snow falls at a steady rate.
- At any instant, there is a certain amount of snow S on the track. Some falling snow comes in front of the plow, some behind.
- During the next revolution of the plow, all of this is removed, plus 1/2 of what falls during that revolution.
- Thus, the plow removes 2S amount of snow.
- Simple mergesort: Place runs into two files.
- Merge the first two runs to output file, then next two runs, etc.
- Repeat process until only one run remains.
- How many passes for r initial runs?
- Is there benefit from sequential reading?
- Is working memory well used?
- Need a way to reduce the number of passes.
- With replacement selection, each initial run is several blocks long.
- Assume each run is placed in separate file.
- Read the first block from each file into memory and perform an r-way merge.
- When a buffer becomes empty, read a block from the appropriate run file.
- Each record is read only once from disk during the merge process.
- Assume working memory is \(b\) blocks in size.
- How many runs can be processed at one time?
- The runs are \(2b\) blocks long (on average).
- How big a file can be merged in one pass?
- Larger files will need more passes -- but the run size grows quickly!
- This approach trades (\(\log b\)) (possibly) sequential passes for a single or very few random (block) access passes.
- A good external sorting algorithm will seek to do the following:
- Make the initial runs as long as possible.
- At all stages, overlap input, processing and output as much as possible.
- Use as much working memory as possible. Applying more memory usually speeds processing.
- If possible, use additional disk drives for more overlapping of processing with I/O, and allow for more sequential file processing.